۱۰ کاربرد اصلی سروو موتورها در رباتیک

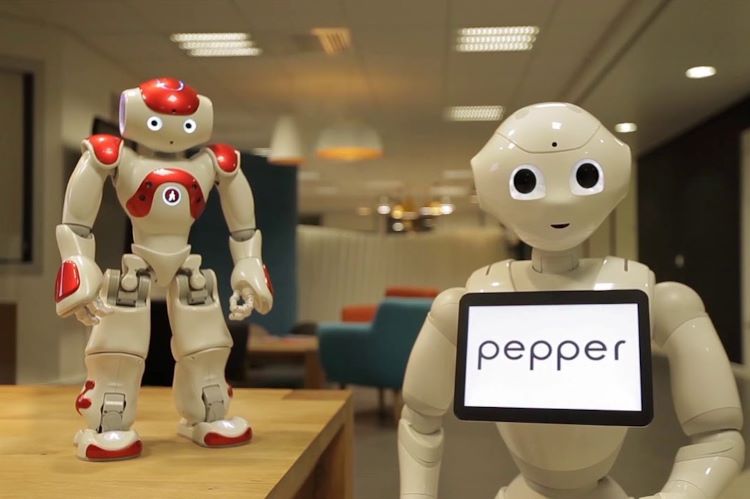
بات ها با حرکات فیزیکی و تعامل با محیط از کامپیوترها متمایز می شوند. برای مثال همانند فیلمی که در بالا میبینید رباتها میتوانند پرواز کنند، با پاهای خود راه بروند، مثل خودروها حرکت کنند. اشیا را جا به جا کنند و حرکات آکروباتیک داشته باشند، به عنوان یک سرباز به جنگ بروند و حتی به عنوان یک ربات تحقیقاتی به فضا بروند و در کارخانه و کارگاهها مشغول به کار شوند و بسیاری از کارهای دیگر را همچون انسان انجام دهند.
یکی از عواملی که باعث به وجود آمدن این تواناییهای مکانیکی در رباتها میشود وجود فناوری پیشرفته به نام سروو موتورهای هوشمند است که مهندسان در طراحی و ساخت ربات ها از آن استفاده میکنند.
یکی از برندهای بسیار معروف این سروو موتورهای هوشمند در جهان سروو موتورهای داینامیسل از تولیدات برند Robotis کره جنوبی است که در ادامه به بررسی ۱۰ کاربرد متنوع سرو موتورهای هوشمند داینامیکسل در رباتهای مختلف خواهیم پرداخت.







